
Sorry for the late reply, tied up. Thankyou for the photos.
The Z-axis leadscrews look OK in the photos (nothing obviously wrong). That’s a very clean and new printer.
Q1. Is there any grease on those Z-axis leadscrews (tall metal spiral rods) or are they completely dry?
Q2. If you force your printer to move up and down does it make unusual noises at some parts of its travel height? You can try typing thing g-code into your printer monitor software to make it move up and down:
G0 Z100 F1000 (move to Z position 100mm. You won't actually travel at 1000mm/minute, instead the printer will do whatever it's max is)
G0 Z0 F1000 (move to Z position 0mm, ie nozzle touching the bed)
You may need to home the axes first (G28)
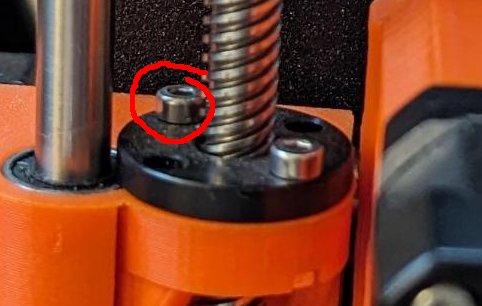
Q3. Are these screws on both sides properly tight? I think I might possibly see a gap under one, but it could also be an optical illusion from reflections.


“Thou has missed daily prayers for two whole weeks”